
[abonnement gratuit]
l'auteur
|
Emmanuel Bigler
est professeur (aujourd'hui retraité) d'optique et des
microtechniques à l'école d'ingénieurs de mécanique et des
microtechniques (ENSMM) de Besançon.
Il a fait sa thèse à l'Institut d'optique à Orsay
E. Bigler utilise par ailleurs une chambre Arca-Swiss
Mail

|
|
|
Profondeur de Champ et règle de Scheimpflug
: une approche simple
Emmanuel BIGLER
ENSMM, 26 chemin de l'Épitaphe, F-25030 Besançon cedex, mél :
Mail
(english version)
Résumé : On se propose de montrer comment à partir de considérations
d'optique géométrique et un minimum de formules simples on peut déterminer
que les limites de profondeur de champ d'une chambre basculée selon la règle
de Scheimpflug sont données par deux autres plan
inclinés satisfaisant une règle tout à fait analogue. On introduit un tracé
géométrique qui, de façon étonnante, résout sans calculs l'ensemble des
questions posées. Le problème de la profondeur de foyer est analysé
également et interprété de façon similaire. Les formules générales pour la
profondeur de champ, valables en macro-photo, sont présentées en détail en
annexe. On y discute également de la signification et du choix des valeurs
possibles pour le cercle de confusion géométrique qui est à la base même de
la notion de profondeur de champ ou de tolérance de netteté en photographie
classique.
Introduction
Le but de cet article est de répondre le plus simplement possible à la question
que l'on se pose immédiatement après avoir réglé les bascules sur une chambre
pour satisfaire la règle de Scheimpflug: lorsque le
plan objet et le plan image, inclinés, satisfont la règle, quelle est la zone de
l'espace objet qui va être « rendue nette » sur le film si on accepte une
certaine tolérance de mise au point au sens d'un cercle de confusion
acceptable dans le plan (incliné) du film ?
Le lecteur épris de rigueur mathématique se référera avec profit à l'article
complet de Bob Wheeler [1],
travail basé sur l'approche classique des cercles de confusion, mais étendu sans
approximation au cas où le plan du film est incliné. On consultera également
avec profit le calcul détaillé de Martin Tai [2].
Un graphique simple à comprendre est présenté dans le gros livre de référence de
Leslie Stroebel [5],
mais il n'y aucune explication sur l'origine des diagrammes présentés. Nous
retrouvons l'origine de ces courbes de Stroebel
d'abord par un tracé géométrique proposé par Leonard Evens [9],
puis par un calcul numérique dont les résultats sont présentés graphiquement en
annexe . Les formules plus générales de profondeur de
champ valables en macrophoto ou en microscopie, ainsi qu'une discussion sur le
choix des valeurs possibles pour le cercle de confusion géométrique sont
également présentées en annexe.
Le défi que nous souhaitons relever ici est de retrouver des résultats
utilisables dans la pratique, en particulier le diagramme de Merklinger [3],
[4], [7], avec
le minimum de maths et dans le même esprit que le tracé géométrique présenté sur
ce site [8] pour la démonstration de la règle
de Scheimpflug.
Il apparaît que, moyennant un minimum d'approximations raisonnables
correspondant à la situation pratique en prise de vue à la chambre, on peut
comprendre quels sont les plans de netteté limite lorsqu'on bascule la chambre
en considérant que ces plans correspondent aux deux plans inclinés (proche et
lointain) qui donneraient une image nette dans le plan du film avec le même
objectif, mais équipé d'une bonnette convergente ou divergente de focale +H
ou -H, où H est la distance hyperfocale.
Cette analogie simple donne immédiatement une première solution approchée du
problème de la détermination de la profondeur de champ, pour des objets situés
suffisamment loin, lorsque la chambre est basculée. On retrouve en particulier
le diagramme proposé par Harold M. Merklinger [3],
[4].
Nous terminerons en proposant une approche purement géométrique, proposée
initialement par Leonard Evens [9],
qui, moyennant un artifice simple concernant l'évaluation des cercles de
confusion dans la projection d'images défocalisées, donne par le tracé de
trois « rayons » la solution de l'ensemble des questions de profondeur de champ
et de profondeur de foyer dans une chambre basculée.
Position des plans inclinés définissant la zone de netteté autour d'un objet
incliné
Quelques approximations raisonnables
Considérons la situation d'une chambre basculée dont les mouvements sont mis en
place suivant la règle de Scheimpflug (fig.4).
On va faire les approximations suivantes :
-
tout d'abord on va négliger le fait que la projection du diaphragme par un
faisceau lumineux issu d'un point source hors du plan de netteté (tel que
P1, figure 1) n'est
plus, sous l'effet de la bascule, un cercle mais une ellipse
; la prise en compte détaillée de cet effet est analysée dans l'article de
Bob Wheeler [1]
qui montre, après un long et rigoureux calcul, que l'on peut in fine
négliger cette « ellipticité » dans la pratique si on s'en tient à des
angles de bascule assez petits. On verra à la fin de l'article comment on
peut exploiter au maximum cette approximation pour tout résoudre sans
calculs analytiques.
-
ensuite on ne va considérer, dans un premier temps, que des objets
suffisamment distants ; en d'autres termes on va d'abord s'intéresser à
trouver la forme limite de la zone de netteté à grande distance, c'est à
dire pour une distance p entre l'objet et l'objectif très supérieure
à la focale f. On va montrer ici que dans ce cas limite, les
classiques formules de conjugaison impliquent que ces surfaces sont en fait
des plans formant un coin, sachant que la forme mathématique complexe
de ces surfaces dans le cas général (pour des très grands angles de bascule,
si on ne néglige plus l'effet d'ellipse de défocalisation) est détaillée
dans le document de Bob Wheeler.
On verra par la suite que cette hypothèse « grande distance » n'est même pas
requise, la solution qu'on peut trouver par calcul numérique (voir en
annexe 6 ) n'étant, de fait, qu'une illustration
« obscurcie » par les chiffres d'un tracé géométrique simple, celui de L.
Evens [9], présenté ici sur la
figure 7.
-
enfin on va considérer l'objectif de chambre comme une lentille mince
convergente, et non pas un système épais convergent, ce qui n'est pas gênant
là encore en considérant des objets à grande distance, à condition
d'utiliser une optique de formule quasi-symétrique comme c'est le cas de la
plupart des optiques de chambre. Là encore le tracé géométrique proposé en
fin d'article 8 permettra de s'affranchir
totalement de cette hypothèse et de comprendre, du moins qualitativement, ce
qui se passe dans une optique épaisse dissymétrique, quelle que soit la
position de l'objet.
Un « trésor caché » dans les formules classiques !
Définissons par p1 la position du plan
limite « proche » de netteté acceptable et par p2
la position du plan limite « lointain » de netteté acceptable. On trouve dans la
plupart des ouvrages et sur ce site [10] les
formules classiques qui servent à graduer les échelles de profondeur de champ
sur les barillets et les bagues des optiques classiques à mise au point
manuelle :
où on désigne par H la distance hyperfocale pour une valeur donnée
du nombre d'ouverture N et du cercle de confusion c . Le nombre
d'ouverture N est défini par : N=f/a, f étant la distance
focale et où dans le cas général a désigne le diamètre de la pupille
d'entrée de l'objectif ; dans tout ce qui suit à l'exception de la figure 8,
nous assimilerons l'objectif à une lentille mince convergente, hypothèse qui
s'étend sans effort au cas d'une optique de chambre quasi-symétrique dont les
pupilles d'entrée et de sortie sont de même diamètre. Enfin, l'hyperfocale H
est définie comme d'habitude :
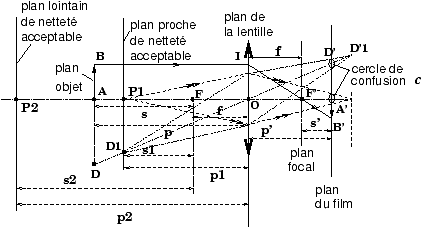
Figure 1 : Définition classique des distances p1
et p2 donnant la profondeur de
champ pour un cercle de confusion de diamètre c
Notons que le tracé de rayons pour l'image de D1
hors d'axe donnera dans le plan du film A'B' une « pseudo-image » de
défaut de mise au point, sous la forme d'une tache circulaire (et non pas
elliptique comme on pourrait le penser à première vue) exactement identique à
celle issue de P1, et de même diamètre ;
c'est une propriété classique de la projection conique (ici : de centre D1')
ou de l'homothétie en trois dimensions entre plans parallèles. Cette tache sera
centrée en D'
sur le rayon moyen D D1 O D' D'1,
passant par le centre O de la lentille : cette remarque prendra toute son
importance dans la suite.
En utilisant les formules de profondeur de champ classiques (1)
et la formule de Descartes (3) (écrite ici avec des valeurs
positives pour les distances p et p')
on obtient finalement la formule intéressante suivante (4)
reliant les positions p1 et p2
des plans de netteté limite avec la position de l'image p' :
|
|
+ |
|
= ( |
|
+ |
|
) = |
|
; |
|
+ |
|
= ( |
|
- |
|
) = |
|
(4) |
ce qui en définitive n'est rien d'autre que la relation de Descartes
objet-image pour une image A' située à la distance p' du centre de
la lentille O, cette image se formant à travers un système optique dont
l'inverse de la focale serait (1/f+1/H) pour le plan de netteté limite
proche p1 et (1/f-1/H)
pour le plan de netteté limite éloigné p2.
La quantité (1/f+1/H) n'est rien d'autre que l'inverse 1/f1
de la distance focale d'un système formé de deux lentilles accolées, une
lentille de focale f et une bonnette convergente de focale +H où
H
est la distance hyperfocale (bien entendu H dépend du diaphragme
choisi).
En effet, lorsqu'on accole deux lentilles ce sont simplement leurs
convergences
(inverse de la focale) qui s'ajoutent. De façon symétrique, (1/f-1/H)
représente l'inverse 1/f2 de la distance
focale d'un système formé de deux lentilles accolées, une lentille de focale
f et une « bonnette » divergente de focale -H.
Une « bonnette de visualisation de la profondeur de champ » ?
Avant d'aller plus loin, voici, dans un cas particulier, un exemple « pratique »
montrant comment l'addition d'une bonnette convergente ou divergente permet de
retrouver une règle très classique de profondeur de champ que tous les
photographes connaissent (figure 2).
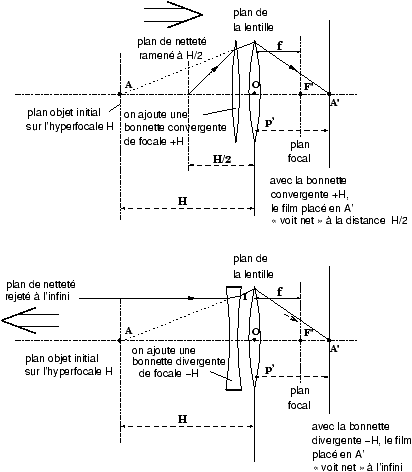
Figure 2 : Comment l'ajout d'une bonnette convergente ou divergente de
focale +H ou -H permet de retrouver une règle très classique de
profondeur de champ
On sait que si un objectif est réglé sur la distance hyperfocale H, tous
les objets situés entre H/2 et l'infini donneront une image de netteté
acceptable sur le film. Reprenons donc l'objectif réglé sur l'hyperfocale et
ajoutons-lui une bonnette convergente de focale +H ; le tracé de rayons
de la figure 2 montre que c'est le plan situé à une
distance H/2 qui sera « vu rigoureusement net » si on ne change pas le
tirage de l'appareil, c'est à dire la position du film par rapport à l'objectif.
De la même façon le même objectif additionné d'une « bonnette divergente » de
focale -H enverra sur le film une image nette des objets à l'infini. Le
même raisonnement s'applique en fait pour un réglage de distance initial
quelconque différent de H, dans ce cas les formules (4) sont simplement
une généralisation à une distance objet-appareil p quelconque ; mais le
résultat est identique : les limites de profondeur de champ sont données par les
plans-objet « rendus nets » à travers l'objectif muni des bonnettes
+H ou -H.
Peut-on utiliser cela en pratique pour visualiser la profondeur de champ ? Ce
serait très commode, classiquement pour tester la profondeur de champ lorsqu'on
doit fermer l'objectif aux petits diaphragmes (ce qui arrive souvent en prise de
vue à la chambre) on perd beaucoup de lumière. Il devient de plus en plus
difficile de voir où se situent les limites de netteté sur le dépoli : on
pourrait donc penser plus commode de garder l'objectif à son ouverture maximale
et de visualiser les deux plans de netteté proche et lointain en regardant à
travers une bonnette de focale +H ou -H simplement tenue à la main
devant l'optique.
A priori, cela pourrait marcher, mais le problème est que les classiques
bonnettes photographiques sont toujours convergentes et que de plus il
n'y en a pas à ma connaissance de focale plus longue que 2 mètres. L'opticien du
coin aura bien sûr des lentilles convergentes ou divergentes dans son stock
(presque toujours sur commande d'ailleurs) et ce à un prix abordable, mais là
encore il n'en aura pas de focale plus longue que 2 mètres (soit des lentilles
moins « fortes » que 1/2 dioptrie : l'intérêt de verres d'aussi faible puissance
est quasi-nul en optique ophtalmique). Or en grand format la distance
hyperfocale est toujours très supérieure à 2 mètres. Prenons l'exemple d'une
chambre grand format avec un cercle de confusion conventionnel de 100 microns et
une focale de 150 mm, pour que l'hyperfocale « descende » à 2 m il faudrait
fermer à f/112. Une ouverture à la fois « impossible » en pratique et pour
laquelle ce modèle d'optique géométrique de la profondeur de champ commence à
tomber grossièrement en défaut à cause de la diffraction (voir en annexe 3 ).
Essayons néanmoins en 24x36 (il existe effectivement des objectifs à bascule et
décentrement en 24x36). Prenons une optique de 35 mm de focale avec un cercle de
confusion conventionnel de 33 microns. Pour que l'hyperfocale soit de 2 mètres
il faut fermer à environ f/18 : c'est donc jouable. Avis donc aux utilisateurs
d'objectifs à bascule f=35mm en 24x36 : les deux lentilles de plus ou moins 1/2
dioptrie vous permettront d'avoir une bonne idée des limites de profondeur de
champ à f/16-f/22 sans avoir à fermer le diaphragme, quel que soit le réglage
--modéré-- de bascule choisi, comme nous allons le montrer ci-dessous.
Pour les utilisateurs de grands formats, les plus nombreux sans doute à utiliser
les bascules pour étendre la profondeur de champ, la « bonnette de visualisation
de la profondeur de champ » semble en revanche devoir rester seulement un
artifice géométrique (simple et commode néanmoins) pour trouver où sont les
plans de netteté acceptables avec une chambre basculée comme expliqué
maintenant.
Où M. Scheimpflug est à nouveau mis à contribution et donne la solution
Dans le cas où la chambre est réglée avec une bascule, il suffit de reprendre le
montage de la figure précédente (comme la figure 2, mais
cette fois avec un plan-objet incliné : figure 4). Et il
suffit simplement de considérer à la place de l'objectif de départ le nouveau
système formé de la bonnette et de l'objectif accolés.
Une dernière subtilité à prendre en compte...
À ce point de la discussion il nous faut encore résoudre une petite difficulté
pour que l'analogie avec la lentille additionnelle soit parfaite. Nous avons une
formule (4) qui relie la position longitudinale d'une tache de défaut
de mise au point, que nous appellerons aussi une pseudo-image (sa
position n'obéit pas aux règles de conjugaison habituelles des « vraies »
images) dans le plan du film incliné avec la position correspondante d'un point
source dans l'espace objet. Rappelons que cette tache est a priori de
forme elliptique, mais lorsque l'angle de bascule est faible son contour limite
sera très proche d'un cercle. La position du centre de ce cercle nous fournira
la position de la pseudo-image, le but recherché étant de déterminer les points
de l'espace objet qui « envoient » une pseudo-image centrée en un point donné du
film incliné. Quelle est donc la position, mesurée latéralement, pour cette
pseudo-image ? Pour trouver cela un tracé de rayons supplémentaire est
nécessaire (figure 3).
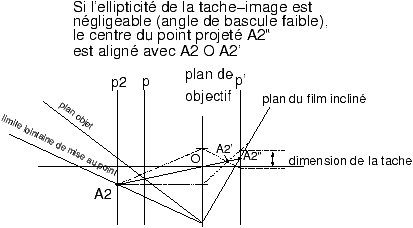
Figure 3 : La position latérale (grandissement transversal) pour le centre
d'une pseudo-image, tache circulaire de défaut de mise au point, est la
même que pour une vraie image si l'angle de bascule est faible
À cause des propriétés de base de la projection conique de centre O, en
négligeant « l'ellipticité » de la tache de défaut de mise au point, le centre
de cette tache, A2'', est aligné avec le
rayon moyen A2 O A2'.
De ce fait, le grandissement transversal pour la position du centre de la tache
de défaut de mise au point A2'' est
le même que pour une vraie image formée par une association de lentilles minces
centrées en O. Ce grandissement est égal à p'/p2,
c'est à dire exactement la même valeur que celle obtenue si A2''
était l'image nette de A2 à travers
l'objectif muni de sa lentille mince additionnelle. Ainsi, la formule de
conjugaison longitudinale et le grandissement transversal définissant la
position de la pseudo-image de défaut de mise au point sont exactement les mêmes
que pour la formation d'une « vraie » image à travers l'optique de chambre munie
d'une bonnette de focale ± H. L'analogie est donc totale, ce qui
nous permet de conclure en s'appuyant sur les propriétés de formation d'images
classiques sans refaire de calcul analytique : on sait que l'image d'un plan
incliné à travers une optique est un autre plan incliné.
... et M. Scheimpflug nous donne la solution sans calcul !
Sans aucun calcul supplémentaire, on peut donc appliquer la règle de
Scheimpflug
au système formé par ces deux lentilles et on en conclut simplement que
les surfaces limitant la zone de netteté acceptable,
pour des objets lointains, pour une chambre réglée suivant la méthode de
Scheimpflug, sont simplement les plans-objets conjugués du film à travers
une optique (équivalente à une lentille mince de centre O) dont la
distance focale est égale à f1
(pour p1) ou f2
(pour p2).
On en déduit donc sans calcul que les deux plans inclinés G1
P1 et G2 P2
se coupent suivant une même ligne au point S (figure 4)
en rencontrant en ce point le plan-objet incliné A'S c'est à dire le plan
du film.
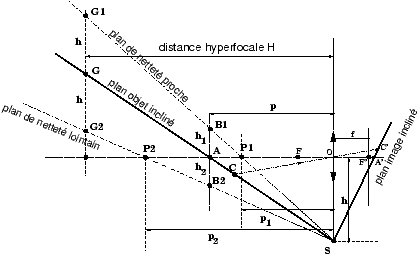
Figure 4 : Détermination approchée de la position des plans limites de
netteté à grande distance pour une chambre basculée suivant la règle de
Scheimpflug : il suffit de rajouter une bonnette de focale + H ou
-H
Pour déterminer la position de ces plans, il suffit de dire qu'ils doivent
passer par S et qu'ils doivent couper l'axe optique à une distance p1
(point P1) ou p2
(point P2), respectivement.
De façon plus précise (juste un peu de géométrie plane) : en considérant les
triangles semblables P2 A B2
semblable à P2 O S
et B1 A P1
semblable à S O P1, puis
en utilisant la formule (1), on obtient finalement un
résultat très simple. En posant h=OS (figure 4),
on trouve que les deux distances verticales h1
et h2 (qui séparent le plan-objet
incliné S A G des plans de netteté limite S P1 G1
et S P2 G2)
sont en fait égales, et valent :
Pour continuer et trouver quelque chose d'utilisable par le photographe désirant
une méthode pratique de réglage de sa chambre, considérons un plan G1 G G2
perpendiculaire à l'axe optique et situé à la distance hyperfocale H
du plan de la lentille (fig.4). Là encore des triangles
semblables vont nous aider, G1 G S
semblable à B1 A S
et G G2 S
semblable à A B2 S
nous permettent de déterminer finalement cette règle pratique :
h étant la distance entre l'axe optique et le « point de
Scheimpflug »
S, un résultat simple et de bon goût donné par Harold M. Merklinger dans
la référence [4] et présenté sur ce site [10].
Enfin remarquons que pour des objets distants, le point image A' sur
l'axe est situé très près du foyer image F'. De ce fait, la distance h,
difficile à estimer en pratique, peut être trouvée indirectement à partir du
« triangle de chambre » O S A', puisqu'on connaît la focale f
et qu'on peut mesurer ou lire sur des graduations une valeur approchée de
l'angle de bascule angle(OSA') ; puisque 0A' ~ OF' =
f, on a donc : tangente (angle(O S A')) ~ f/h. Pour des
angles de bascule suffisamment faibles on peut assimiler tangente (angle(O S
A')) ~ sinus (angle(O S A')), ce qui permet d'identifier ce résultat
avec celui des références [4] et [10].
Dans ces documents, le dessin est tracé avec une ligne de référence
perpendiculaire au plan du film et non pas perpendiculaire au plan de
l'objectif comme ici, ce qui explique le sinus au lieu de la tangente
(identiques pour les angles faibles).
Tout ceci laisse un peu sur sa faim, car on aimerait trouver quelque chose
d'aussi simple géométriquement, mais qui resterait valable quelle que soit la
position de l'objet... Étonnamment, ce modèle existe, on se reportera en fin
d'article (voir figure 7).
Application à la profondeur de foyer, pour des objets éloignés
Un problème voisin de celui de la profondeur de champ, est
celui de la profondeur de foyer. On peut l'énoncer comme suit :
étant donné un plan objet supposé fixé, quelle est la tolérance mécanique
acceptable sur la position du film pour que l'image de ce plan soit
acceptablement nette ? La figure suivante (figure 5)
nous donne la solution, du moins pour commencer dans le cas d'un plan-objet
perpendiculaire à l'axe.
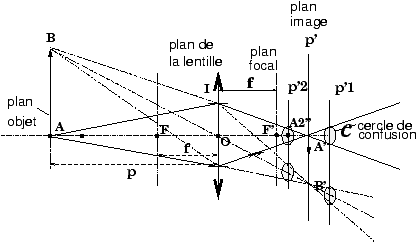
Figure 5 : Un tracé de rayons analogue aux précédent permet de déterminer
quelle est la profondeur de foyer pour des plans perpendiculaires à
l'axe optique
Si on appelle p' la position du film correspondant à l'image nette d'un
plan-objet p, les deux positions p1'
et p2' limites de netteté acceptable
seront données par :
| p'1
= p'.(1+ |
|
) ; p'2 = p'.(1- |
|
) (7) |
Lorsque l'objet A est situé à grande distance, c'est à dire p
beaucoup plus grand que la focale f, on aura p'~ f, d'où
une profondeur de foyer totale p'1
- p'2= 2f2/H=
2Nc. On se reportera à l'annexe 5
pour plus de détails sur les formules analytiques utiles au problème de la
profondeur de foyer.
Finalement, la solution exacte est la plus simple !
Après tout cet effort de simplification, on pourrait penser que tout espoir de
trouver une solution exacte au problème est vain, et que de toutes façons il ne
serait d'aucune utilité pratique. Or il se trouve que malgré d'interminables
discussions sur Internet au sujet de la forme des zones de profondeur de champ
et de foyer pour une chambre basculée, il existe de fait une approche
géométrique sans calcul qui permet de résoudre à la fois les deux problèmes.
Pour cela, il faut repartir de l'hypothèse des faibles angles de bascule, et la
reformuler sous une forme qui apparaîtra a priori des plus singulières.
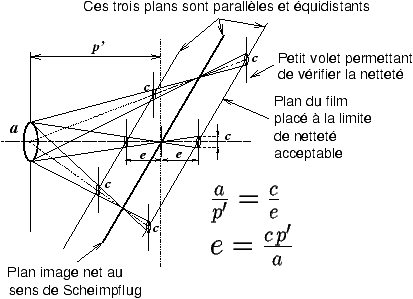
Figure 6 : La clé d'une solution géométrique simple consiste à regarder se
former l'image défocalisée d'un point sur un petit volet maintenu
parallèle à la pupille de sortie, perpendiculaire à l'axe optique
Pour regarder la forme de la tache défocalisée issue d'un point de l'objet, au
lieu de la regarder se projeter sous forme d'une ellipse sur le plan incliné du
film, projetons là sur un petit volet perpendiculaire à l'axe optique et
parallèle à la pupille de sortie de l'objectif. Le centre de ce petit volet
reste placé sur le film, ce qui fait que l'ensemble ressemblera un peu à un
volet à persiennes si on considère l'ensemble des projections possibles.
En chaque point du film, formons sur un volet la projection de la pupille de
sortie, supposée circulaire, et non soumise à l'effet de distorsion pupillaire
présent dans la plupart des objectifs de chambre grands angulaires modernes.
Sous cette hypothèse, la tache qui se forme sur chaque petit volet est un cercle
ce qui va simplifier considérablement l'analyse.
Décidons que le critère de netteté acceptable sera donné par le fait que ce
cercle projeté ne dépasse pas en diamètre une certaine valeur de cercle de
confusion, c.
Décidons de plus, un peu arbitrairement, que la position acceptable pour le film
en limite de netteté (défini par une certaine valeur de c), sera la
surface qui réunit les centres de tous les petits volets. Quelle est cette
surface, et où se trouve-t-elle ?
Les classiques lois de l'homothétie géométrique nous indiquent que les
projections de la pupille sur des petits volets parallèles à celle-ci sont
toutes de même diamètre c si le centre de ces volets est placé sur des
plans parallèles et équidistants au plan image net. Plus précisément : les lieux
des centres des petits volets, lieux des images défocalisées qu'on examine, se
déduisent du plan image net par une homothétie dont le centre est celui de la
pupille de sortie et dont le rapport vaut (1+-c/e) = (1+-a/p'). Le signes
+ ou - définissent les deux positions défocalisées acceptables en avant ou en
arrière du plan image net.
La transformée d'un plan incliné dans une telle homothétie est un autre plan
incliné parallèle au plan de référence (l'image nette). La projection de la
pupille de sortie circulaire sur des petits volets parallèles à celle-ci sont
des cercles tous de même diamètre c sous réserve que la condition e
=cp'/a soit réalisée au niveau de l'axe optique, les lieux des centres des
petits volets se déduisant par un tracé parallèle au plan image net. On
détermine donc ces plans en traçant suivant l'axe optique un rayon moyen entouré
d'un cône se projetant sur un cercle de diamètre c (figure 6).
On en déduit très facilement que les lieux de netteté acceptable sont deux
plans parallèles au plan image net ; cette remarque est la clé qui va,
finalement, tout expliquer.
Remarquons qu'à aucun moment les formules de conjugaison objet-image ni la
position des plans principaux de l'objectif ne sont évoqués, seule compte dans
cette projection la distance mesurée parallèlement à l'axe optique entre le
centre de la pupille de sortie et l'endroit où l'axe coupe le plan image net
incliné.
Aussi étonnant que cela puisse paraître, cette remarque d'ordre purement
géométrique très simple résout sans calculs analytiques le problème de la
profondeur de champ et de la profondeur de foyer, grâce à un tracé (figure 7)
de trois « rayons » proposé par Leonard Evens
[9].
Traçons symboliquement des « rayons lumineux » qui se croisent au point Pf
situé dans le plan focal objet, le « rayon » central cheminant dans le plan
objet étant appelé 2.
De l'espace image, traçons en sens inverse les rayons 1'
et 3' parallèles à 2'. Après réfraction, ces rayons se croisent au
point Pf, d'après les propriétés du foyer d'un système optique centré
(règle valable aussi pour un système épais). Pour se guider, on tracera le rayon
00' passant sans être dévié par le centre de la lentille. Les rayons 1',
2', 3' sont parallèles au rayon 0'.
Une objection immédiate est que ces rayons, s'ils peuvent exister en entrée, ne
peuvent pas exister en sortie, puisque la pupille est beaucoup plus petite ! Pas
de problème, le tracé symbolique des rayons en optique géométrique permet de
déterminer la position et la grandeur des images même lorsque le schéma s'étend
très loin hors de la pupille. Il est donc parfaitement légitime de continuer les
tracés de ces rayons « impossibles » pour déterminer le lieu où se trouvent les
images. C'est assez subtil, il faut en convenir, mais une fois ce tracé admis,
tout devient très simple.
Voyons donc comment ce tracé résout tout.
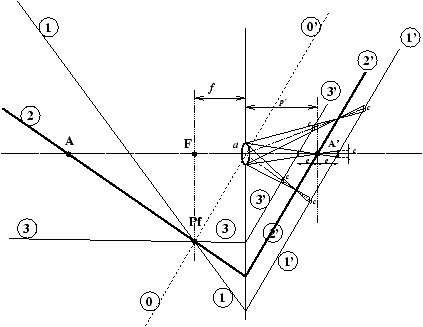
Figure 7 : Le tracé de trois « rayons » de Leonard Evens qui explique
tout !
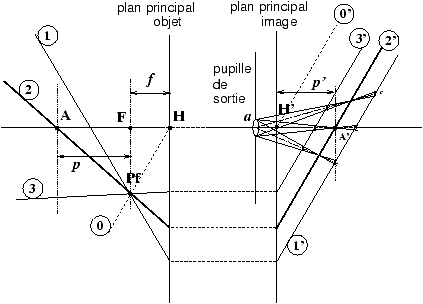
Figure 8 : Généralisation au cas d'une optique épaisse dissymétrique pour
laquelle les pupilles ne sont pas situées dans les plans principaux
Profondeur de champ
Un rayon cheminant dans le plan 1 « sort » par le plan 1' ; le
plan 2', parallèle à 1', est en position limite de netteté si
l'écart e vérifie : e = cp'/a. Un autre rayon cheminant dans le
plan 3 « sort » dans le plan 3' ; le plan
2' est également en position limite de netteté pour le plan parallèle
3'. On en déduit que les plans inclinés 1 et 3 définissent la
zône de l'objet qui se projettera sur le plan 2' avec une netteté
acceptable.
Profondeur de foyer
Le plan objet 2 projette à travers l'objectif une image nette plane 2'
qui satisfait à la règle de Scheimpflug, sans oublier bien sûr les formules de
conjugaison classiques (Descartes, Newton). Les plans 1' et 3'
étant situés de part et d'autre du plan 2' correspondront à la limite de
netteté acceptable s'ils sont parallèles à 2' et s'ils sont distants d'un
écart e = cp'/a mesuré parallèlement à l'axe optique, perpendiculairement
à la pupille de sortie.
Forme de la zône de profondeur de champ côté objet
La zône de profondeur de champ est sans équivoque aucune et dans la limite de
ce modèle des « volets mobiles » définie par un coin entre deux plans 1 et 3
passant par un point-pivot Pf du plan focal objet. Rappelons que le plan
focal objet est situé dans le cas général à une distance focale en avant du plan
principal (ou nodal) objet du système (figure 8).
De plus il n'y a aucune raison pour que les pupilles soient situées dans les
plans principaux ; le tracé de la figure 8
est représentatif d'une optique pour laquelle le grandissement pupillaire est
supérieur à un, c'est le cas des formules grand angulaires « rétro-focus » très
utilisées en petit en moyen format. Pour les optiques de chambre
quasi-symétriques, les pupilles sont placées très près des plans principaux,
seul subsiste comme différence par rapport au cas de la lentille mince le fait
que l'interstice optique HH' est non nul, dans ce cas le tracé de la
figure 7 s'applique en séparant simplement par la
pensée l'espace objet de l'espace image.
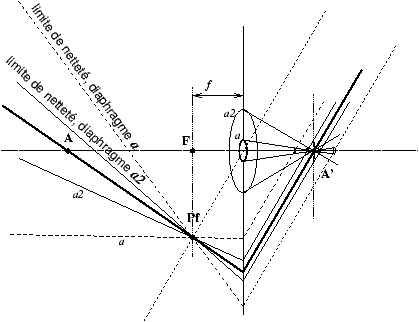
Figure 9 : Influence du diamètre de pupille a sur la profondeur de
champ pour une valeur de cercle de confusion c fixée : la
profondeur de champ augmente lorsque qu'on ferme le diaphragme. Le coin
de netteté s'ouvre comme un éventail pivotant autour du point Pf.
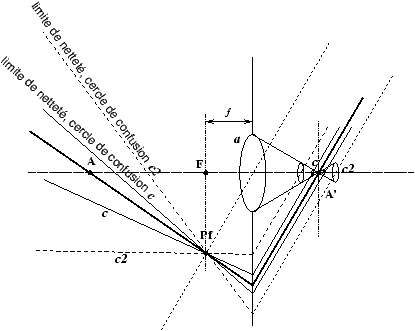
Figure 10 : Influence de la valeur du cercle de confusion c
sur la profondeur de champ pour un diamètre de pupille a fixé : la
profondeur de champ apparente augmente si on relâche la valeur de c :
mais la qualité d'image globale sera-t-elle encore acceptable ?
Application pratique à la recherche du plan de mise au point en faible
lumière
La zône de profondeur de foyer dans une chambre basculée se situe entre deux
plans parallèles et équidistants au plan image idéal. Dans un premier temps on
voit que la recherche de la meilleure mise au point ne nécessite pas de retouche
de l'angle de bascule, ce qui est plus simple en pratique. La mise au point
d'une chambre s'effectue par translation relative du corps avant (objectif) par
rapport au corps arrière (film). Cette seule translation suffit puisque la zone
à explorer est comprise entre deux plans parallèles. On repérera deux positions
limites « également floues » en dépointant de part et d'autre de la position
centrale qui est difficile à trouver en faible lumière. Plutôt que de chercher
longtemps la position idéale, on cherchera volontairement deux positions limites
floues, et on placera la bonne mise au point exactement à mi chemin entre les
deux positions, que ce soit par translation du corps avant ou du corps arrière.
La translation du corps arrière donne plus facilement le bon pointé en
macro-photo, les deux translations avant ou arrière sont strictement
équivalentes pour un sujet à grand distance.
Bien entendu si la bascule est déréglée, l'objet étant un plan incliné, la
translation ne permettra pas d'obtenir la netteté parfaite sur toute l'image,
mais l'idée est que la translation parallèle permet d'explorer exactement toute
la zone de netteté acceptable de part et d'autre du plan image de Scheimpflug
sans avoir besoin de coupler une rotation de bascule avec la translation.
Le modèle est-il valable avec de grands angles de bascule ?
Si on accepte que le critère de netteté est lu sur les volets mobiles parallèles
à la pupille et non pas sur le film, l'angle de bascule n'intervient pas. En
pratique comme la tache image défocalisée devient elliptique, le critère décrit
sur la figure 7 n'est que très approximatif aux
grand angles de bascule, il reste néanmoins un guide utile. L'idée que la
zone
de profondeur de champ côté objet a la forme d'un coin reste applicable ; plus
on relâche le critère de netteté sur la valeur du cercle c, plus le coin
s'ouvre d'une façon géométriquement très simple à comprendre, en pivotant autour
du point Pf.
Lien avec le modèle approché des bonnettes +H / -H
Le modèle approché de la bonnette de focale +H / -H prédit pour la profondeur de
champ et la profondeur de foyer un espace compris entre deux plans en forme de
coin. De ce coin approché, il ne faudrait donc retenir qu'une toute petite
partie à grande distance (cas de la profondeur de champ) ou très près de l'image
se formant sur l'axe optique (pour la profondeur de foyer), autant dire que le
tracé de la figure 7 qui est tout aussi simple rend
sans objet l'approximation de la figure 4. En revanche le
modèle des deux bonnettes fonctionne assez bien pour les objets distants ; là
encore le tracé exact n'est pas plus compliqué et il a le grand avantage de
rester valable en macro photo.
Résumé et Conclusion
En Résumé :
-
À grande distance on peut interpréter le problème de la profondeur de
champ comme la recherche des plans de netteté vus en ajoutant une lentille
de focale +H ou -H. On en déduit une forme de coin entre deux
plans pour la zone de netteté, ce qui est qualitativement correct
(figure 4);
-
À toute distance, pour toute combinaison objet-image, en admettant qu'on
« lit » l'image défocalisée sur des petits volets parallèles à la pupille de
sortie pour décider si la netteté est acceptable ou pas, c'est à dire en
négligeant le fait que la tache image de défocalisation est une ellipse, un
seul tracé géométrique à trois rayons (figure 7)
donne la solution même dans le cas général d'une optique épaisse
dissymétrique (figure 8).
Les conclusions de ce long cheminement qui partent de formules analytiques pour
essayer de les simplifier, sont donc que, moyennant une hypothèse un peu
extravagante qui consiste à regarder les cercles de confusion se projeter sur de
petits volets mobiles, un seul tracé géométrique, celui de Leonard
Evens
annule et remplace des pages de discussions interminables, argumentations qui se
réfugient toujours derrière des développement analytiques illisibles. En
particulier le tracé par ordinateur (figure 11) ne donne
rien d'autre qu'une belle épure très simple et qui contient tout.
Pour autant, avons-nous gagné quelque règle pratique qui permette une meilleure
utilisation des mouvements de la chambre sur le terrain.
L'idée que, sans équivoque, la zone de profondeur de champ est contenue dans un
coin de forme simple entre deux plans, et que la zone de profondeur de foyer est
également définie par un critère très simple et applicable à la recherche du
meilleur plan à partir de deux plans limites parallèles, cette idée nous donne
un cadre d'interprétation très simple. Rodenstock propose une règle à calculs
pour déterminer les bascules et la profondeur de champ « spécial Scheimpflug » :
il serait étonnant que ses principes diffèrent notablement du tracé des figures 6
et 7.
En revanche l'idée qu'on puisse en tirer quelque méthode robotisée pour faire un
réglage parfait de la mise au point et des bascules ne nous semble guère
attirante, bien qu'elle soit possible techniquement. L'œil et la main, associés
sur le terrain lors de la prise de vue, voici le plus important, même si on peut
apprécier l'idée qu'un modèle géométrique si simple est là, en arrière-plan,
pour s'y référer le cas échéant.
Annexes : formules de profondeur de champ plus générales, valables en
macro-photo, limites au choix du cercle de confusion c, tracé de
profondeur de champ par calcul numérique
Annexe 1 : Profondeur de champ : formules générales valables en macro
À partir des formules de conjugaison objet-image de Newton,
s.s'=f.f (figure 1), en ré-introduisant ensuite les
distances p1 et p2
il n'est pas très difficile (bien qu'un peu long) en traçant quelques triangles
et moyennant un peu d'algèbre de retrouver des formules de profondeur de champ
plus générales qui après simplification demeurent étonnamment simples. Ces
formules sont celles utilisées dans le java-script WWW
www.galerie-photo.com/profondeur_de_champ_calcul.html
et dans la feuille de calcul à télécharger
www.galerie-photo.com/profondeur_de_champ_avec_excel.html
Quel est le domaine de validité de ces formules. Tout d'abord, il faudra
toujours considérer que l'angle de bascule reste assez faible pour qu'on puisse
négliger « l'ellipticité » de l'image défocalisée d'un point source, qui est la
projection de la pupille de sortie sur le film.
De plus, ces formules pourront être valables pour un système épais à condition
que le centre des pupilles du système ne soient pas trop éloignées des points
nodaux, comme c'est le cas pour les objectifs de chambre quasi-symétriques. Dans
le cas d'une optique très dissymétrique comme un télé-objectif (cela existe en
optiques de chambre), ou un rétro-focus (formules grand angulaires, de fait non
utilisées à la chambre, mais indispensables aux appareils reflex) ou bien plus
généralement si les pupilles sont très éloignées des points nodaux, toute cette
approche classique de la profondeur de champ tombe a priori en défaut, ou
du moins il conviendra de refaire le tracé des rayons sortant de la pupille au
cas par cas. Qualitativement bien sûr la profondeur de champ va augmenter en
diaphragmant, mais les formules (9) ne seront plus valables.
La démarche est la suivante : en partant d'un objet AB perpendiculaire à
l'axe optique, il s'agit de déterminer les positions p1
et p2 des plans de netteté acceptables
dans l'espace objet, au voisinage d'une position p fixée de l'objet
servant de référence (le détail de ce calcul sera volontiers envoyé aux lecteurs
intéressés). Une autre formulation équivalente est proposée par Nicholas V.
Sushkin sur son site web [6]:
http://www.dof.pcraft.com/dof.cgi.
En supposant une certaine valeur c pour le diamètre du cercle de
confusion, un tracé de rayons et un calcul non reproduits ici donnent, toutes
simplifications faites :
|
|
= |
|
+ |
|
.(1- |
|
) ; |
|
= |
|
- |
|
.(1- |
|
) (8) |
On peut écrire ces formules sous une autre forme équivalente :
où (voir figure 1), f est la distance focale de
l'objectif (assimilé ici à une lentille mince convergente), p la position
du plan objet AB (mesurée à partir du plan principal objet
de l'optique), en supposant que cet objet est perpendiculaire à l'axe optique ;
p1 et p2
sont les positions ``proche'' et ``lointaine'' de netteté acceptable autour de
l'objet, sur l'axe.
Ici pour une lentille mince, O est confondu avec les plans principaux (ou
nodaux, c'est pareil dans l'air). Pas de problème avec une optique épaisse si
les plans pupillaires ne sont pas trop éloignés des plans principaux
(grandissement pupillaire proche de l'unité), il suffit « d'écarter » par la
pensée l'espace objet de l'espace image d'une valeur égale à la distance entre
les plans principaux, cette distance pouvant d'ailleurs être positive ou
négative.
Annexe 2 : Définition de l'Hyperfocale « vraie »
Remarquons tout d'abord une petite subtilité dans la définition de la distance
hyperfocale. En effet si à partir des formules exactes (9) et (10) on cherche à
quelle distance de mise au point p on renvoie la position de netteté
lointaine p2 à l'infini, on trouve une
valeur qu'on peut appeler « hyperfocale vraie » Hvraie
égale à H+f et non pas simplement H. Dans ce cas, si on met au
point sur cette distance H+f, tout sera « acceptablement net » de
l'infini jusqu'à la moitié de cette distance soit (H+f)/2 de manière
analogue à la formule approchée (de l'infini à H/2, mise au point sur
H).
On pourrait donc récrire toutes les formules en fonction de Hvraie
à la place de H ; cela n'a guère d'intérêt, et nous préférons garder pour
H la définition classique de l'hyperfocale car c'est cette quantité
H=(f.f)/(N.c) qui s'introduit le plus naturellement dans le calcul.
Annexe 3 : Le choix raisonnable d'une valeur pour le cercle de confusion
Sous toutes ces hypothèses : ellipticité de c
négligée, pupilles placées « raisonnablement », les formules (9) dérivent
directement des formules de conjugaison de Newton
avec les seules restrictions (pas vraiment limitatives et raisonnables) que le
cercle de confusion c doit rester plus petit que le diamètre de
l'objectif, disons plus de deux fois plus petit que ce diamètre f/N.
Approximation effectivement raisonnable, car le cercle de confusion est fixé en
général à une valeur comprise entre 20 et 150 microns, avec une focale de 100mm
et plus, il faudrait fermer à f/100 ou plus pour descendre au millimètre pour le
diamètre du diaphragme. Pour mémoire, les valeurs conventionnelles des diamètres
c des cercles de confusion sont comprises entre f/2000
et f/1000. On cite souvent la valeur f/1719 qui correspond à une
tache vue sous l'angle de deux minutes d'arc ; on sait que le pouvoir de
résolution angulaire de l'oeil est comprise entre une et deux minutes d'arc, ce
qui permet une interprétation physiologique simple du choix de la valeur de c.
On peut également ré-interpréter la signification de la distance hyperfocale
H=(f.f)/(N.c)
en ré-introduisant la valeur du diamètre a du diaphgrame égale à a=f/N.
On obtient alors la relation simple : H/f = a/c, en d'autres termes le
rapport entre l'hyperfocale H et la focale f est égal au rapport
entre le diamètre a du diaphragme et le diamètre du cercle de confusion
c. la plupart du temps H est beaucoup plus grande que f.
L'hypothèse d'une valeur de H qui deviendrait proche de f bien que
permise géométriquement correspond donc à des valeurs de c extrêmement
élevées : par exemple si on acceptait que c puisse être égal à a/2
ce qui équivaut à H égal à 2f, cela se traduirait par une qualité
d'image très médiocre.
Pour s'en convaincre, reprenons l'exemple d'une optique standard dont la focale
est égale à la diagonale du format et supposons ce format carré pour simplifier.
Dans ce cas le côté du carré vaut environ 0,7.f puisque par définition
d'une focale standard la diagonale du format vaudra f et que le côté d'un
carré est à peu près égal à 0,7 fois sa diagonale. Avec c=a/2=f/(2.N)
on ne peut « caser » qu'un nombre de « points » égal à 2x0,7xN=1,4.N dans
la largeur du format. Même avec N=64 ceci ne nous donne que 90 points au carré
soit moins de dix-mille points au total dans l'image à la limite de netteté !!
Même si ce « flou » ne concerne de fait que certaines portions de l'image, il
est difficile d'admettre qu'une telle valeur de c soit acceptable en vue
d'une image de haute qualité.
Nous venons donc de montrer qu'il était nécessaire de mettre une valeur de
« butée haute » pour le choix de c. Montrons maintenant que la
diffraction impose une valeur de « butée basse » pour c. En effet, il
faut aussi pour que toute cette approche d'optique géométrique reste valable,
que la valeur choisie pour c ne devienne pas comparable à celle de la
tache de diffraction ; celle-ci étant de l'ordre de N microns. Par exemple en
6x6 avec 50 microns de cercle de confusion conventionnel, utiliser le calcul
géométrique pour un diaphragme f/64 n'a pas de sens ; f/32 sera donc la limite
raisonnable de ce calcul en moyen format, qui est aussi la limite des valeurs
des diaphragmes sur la plupart des optiques utilisées en 6x6. Pour une chambre
9x12 / 4"x5", si on prend une valeur de c
de l'ordre de 100 à 150 microns, on voit que f/128 sera l'ultime valeur de
diaphragme raisonnablement utilisable pour déterminer la profondeur de champ
« géométrique ».
Annexe 4 : Au rapport 1:1 ou 2f-2f, la profondeur de champ ne dépend pas de
la focale de l'objectif
Les formules (9) sont valables même pour des courtes distance p,
par exemple en macro-photo, et même en photo au microscope où la distance p
va être à peine supérieure à la focale f. Par exemple dans le cas
particulier de la position de grandissement 1:1 ou ''2f-2f'', la profondeur de
champ totale p2 - p1
est totalement indépendante de la focale, et les formules nous donnent p2
- p1 = 4.N.c. Cette
indépendance de p2 - p1
par rapport à la focale est de fait assurée dans le cas général dès que la
distance de mise au point p devient petite devant l'hyperfocale H,
c'est à dire en photo rapprochée, en macrophoto et en microscopie.
Annexe 5 : Formules analytiques pour la profondeur de foyer
À partir des formules (7) définissant les limites de
profondeur de foyer qui sont écrites sans approximation, on peut combiner avec
les formules exactes de profondeur de champ (9) et retrouver des relations (10)
et (11) assez compliquées et tout à fait d��������nuées d'intérêt pratique, mais qui
ont le bon goût d'admettre comme forme limite une équation analogue à la formule
de conjugaison de Descartes dès que H
est très supérieure à f :
|
|
( |
|
) + ( |
|
) = ( |
|
).(1 + (1-( |
|
)).f2/(H.(H+f))
) |
|
|
|
(10) |
| ( |
|
) + ( |
|
) = ( |
|
).(1 + (1-( |
|
)).f2/(H.(H-f))
) |
|
|
|
(11) |
|
Le terme correctif décroît comme (f/H)2 ;
dans la plupart des situations photographiques courantes avec un cercle de
confusion plus petit que le millième de la focale, ce terme correctif est lui
aussi plus petit qu'un millième. Les équations (10) et (11) sont donc très
proches de l'équation de conjugaison de Descartes reliant p1
à p1' et p2
à p2', sous réserve de validité de
l'équation 1
c'est à dire pour p très grand devant f, là encore une situation courante
sauf en macrophoto.
On peut remarquer que l'équation (7) permet de déterminer dans le cas d'un plan
objet perpendiculaire à l'axe la profondeur de foyer totale, p'1
- p'2 qui est égale à 2.p'.f/H.
En réintroduisant la valeur de H = f2/(N.c)
on trouve une profondeur de foyer égale à 2.N.c. p'/f.
Par exemple dans le cas du rapport 1:1 ou 2f-2f, p' = 2f et on
retrouve pour la profondeur de foyer totale la même valeur que pour la
profondeur de champ totale soit 4.N.c ce qui est satisfaisant vu la
symétrie objet-image au rapport 1:1.
Dans le cas photographique le plus courant d'objets situés à grande distance, on
aura p' très proche de f ; dans ce cas on obtiendra donc
sensiblement une profondeur de foyer égale à 2.N.c, qui de façon
surprenante ne dépend plus de la focale mais seulement de la valeur choisie pour
c. En d'autres termes pour un type de photographie donné (petit format,
moyen format, grand format) si l'on prend conventionnellement la même valeur de
c pour toutes les focales destinée à couvrir un format donné, on peut dire,
mais sous ces conditions seulement, que la profondeur de foyer ne dépend pas de
la focale.
Néanmoins, et pour en terminer avec une discussion un peu délicate, comme la
valeur conventionnelle de c augmente avec le format et donc suit
indirectement, de fait, les variations de la focale normale du format
choisi, on peut aussi en conclure que la profondeur de foyer est en fait
d'autant plus grande qu'on travaille en grand format, ou que la tolérance
mécanique de positionnement du film augmente en travaillant en grand format. Il
est serait un peu hasardeux d'en tirer sans analyse plus approfondie des
conclusion sur la gain en qualité d'image ou en tolérance mécanique (donc en
coût de fabrication) apporté par cet effet de profondeur de foyer lorsqu'on
travaille en grand format.
Annexe 6 : Un calcul numérique pour retrouver les diagrammes de Stroebel...
et retrouver le modèle donné par l'approximation des petites volets
Nous avons proposé plus haut grâce au tracé de rayons
de Leonard Evens une interprétation géométrique plus
générale et tout aussi simple que celle valable à grande distance (fig.4),
où l'« artifice » de la bonnette de focale plus ou moins H
permet une interprétation graphique du résultat sans aucun calcul.
Il est intéressant de faire un tracé graphique qui tient compte des formules de
conjugaison, et qui redonne également le tracé proposé dans le livre de Leslie
Stroebel [5].
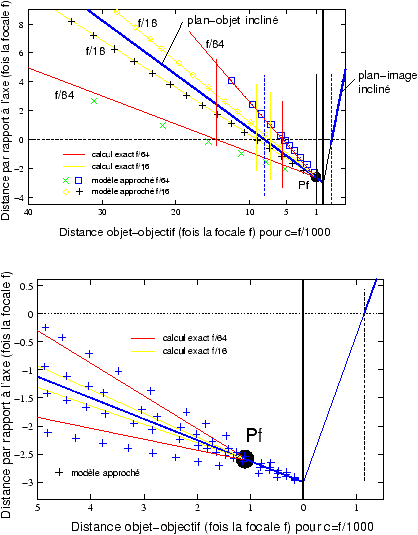
Figure 11 : Une détermination des plans objet de netteté acceptable
analogue à celui de Stroebel (ref. [ 5])
: ceux-ci se croisent en un point de pivotement Pf situé à
une distance focale en avant de l'objectif. On retrouve ici ce résultat
par calcul numérique à partir des formules (9).
Dans cette véritable « bible » de la prise de vue à la chambre, il est indiqué
que les plans-objets inclinés correspondant aux limites de netteté acceptable se
coupent en un point de pivotement Pf (voir la figure 11)
qui est situé non pas dans le plan de l'objectif (au point de Scheimpflug
S) mais à une distance focale en avant de l'objectif, ce point
Pf étant situé dans le plan-objet incliné AS. Pas facile au
premier coup d'oeil sur les formules (9) d'en trouver une explication en peu de
mots, néanmoins il faut admettre que de ces formules découle nécessairement le
tracé de la figure 7.
Laissons l'ordinateur faire le travail, comme si nous ne savions pas déjà la
solution géométrique : pour l'instant, les ordinateurs ne savent pas encore lire
les figures de géométrie plane et les interpréter directement... Le tracé
graphique est basé sur les formules de conjugaison longitudinales exactes et sur
des formules de grandissement transversales pour les pseudo-images défocalisées
équivalentes à celle de l'approximation des petites volets parallèles à la
pupille.
L'ordinateur nous redonne par calcul numérique, et ce serait le contraire qui
serait inquiétant, exactement les zones de profondeur de champ prévues par la
figure 7, c'est à dire les tracés de
Stroebel [5] ou
Evens [9]. On généralise ainsi, sous
une forme numérique exploitable pour imprimer une table de valeurs, les
classiques tables de profondeur de champ, toujours données à angle de bascule
nul. On voit également que pour des optiques pas trop fermées, comme f/16, le
modèle simplifié de la bonnette « plus ou moins H » avec ses plans limites
inclinés fonctionne étonnamment bien. Pour f/64 l'accord sera moins bon à courte
distance : mais on sait pourquoi et on sait comment retracer simplement le bon
diagramme.
Remerciements
Je suis très reconnaissant à Yves Colombe pour avoir
attiré mon attention sur les problèmes particuliers de projection des taches de
défaut de mise au point dans le cas général, pour des systèmes optiques épais
dans lesquels les pupilles ne coïncident pas avec les points nodaux. Simon
Clément a fait justement remarquer la subtilité sur la définition de
l'hyperfocale vraie lorsqu'on utilise les formules plus exactes. La
clarification concernant le grandissement transversal pour les pseudo-images
résulte de la participation à une discussion « enfiévrée » sur le sujet,
échanges sur un groupe Internet Photo nord-américain [11],
le point-clé sur le grandissement transversal ayant été mentionné par Andrey
Vorobyov. Enfin, Simon Clément
et Jean-Louis Llech ont eu la bonne idée d'attirer à
nouveau mon attention sur l'article de Leonard Evens [9],
en particulier une petite figure d'apparence anodine qui, de fait, contient la
clé du problème.
Références
| [1] |
- Bob Wheeler, ``Notes on view camera'',
http://www.bobwheeler.com/photo/ViewCam.pdf
|
| [2] |
- Martin Tai, ``Scheimpflug , Hinge and DOF'',
http://www.accessv.com/~martntai/public_html/
Leicafile/lfdof/tilt1.html
|
| [3] |
Harold M. Merklinger, ``View Camera Focus'',
http://www.trenholm.org/hmmerk/VuCamTxt.pdf
|
| [4] |
- Harold M. Merklinger,
http://www.trenholm.org/hmmerk/HMbooks5.html
|
- [5]
|
- Leslie D. Stroebel, ``View Camera Technique'',
7-th Ed., ISBN 0240803450, (Focal Press, 1999) page 156
|
| [6] |
- Nicholas V. Sushkin, ``Depth of Field
Calculation'',
http://www.dof.pcraft.com/dof.cgi
|
| [7] |
- Q.-Tuan Luong (sur ce site, en français),
www.galerie-photo.com/mise_au_point_a_la_chambre.html
|
| [8] |
- Emmanuel Bigler (sur ce site, en français),
www.galerie-photo.com/demonstration-scheimpflug.html
|
| [9] |
- Leonard Evens, "Some Thoughts on View Camera
Calculations",
http://www.math.northwestern.edu/~len/photos/
pages/dof_essay.pdf
|
| [10] |
- Henri Peyre, (sur ce site, en français),
www.galerie-photo.com/
hyperfocale_et_profondeur_de_champ.html
|
| [11] |
- Discussions concernant le grand format sur photo.net, juillet 2002 :
http://www.photo.net/bboard/q-and-a-fetch-msg?msg_id=003Rdn
|
-
Dernière mise à jour : 2003
|


{kind=link}